Persistence
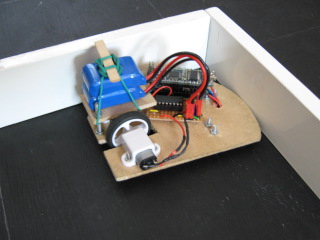
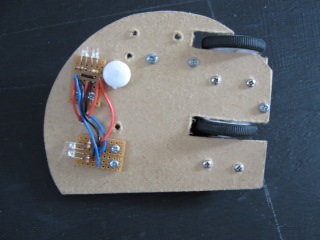
Persistence is my first competition worthy Contact Wall Follower Robot. I entered it into the 27th November ROBOtic 2010 competition in both the Junior Contact Wall Follower and the Junior Time Trial category and it won them both.
I undertook many experiments with this robot (some of which are listed in the links section further down the page) they proved very useful when it came to making a better version.
Although I was pleased with its performance, this was to be an ever-adapting robot and now it has subsequently been replaced with Persistence V2. Which has better weight distribution and a whole new program.
I undertook many experiments with this robot (some of which are listed in the links section further down the page) they proved very useful when it came to making a better version.
Although I was pleased with its performance, this was to be an ever-adapting robot and now it has subsequently been replaced with Persistence V2. Which has better weight distribution and a whole new program.

Awards
FIRST-ROBOtic 2010 Junior Contact Wall Follower (Click to see pictures)
FIRST-ROBOtic 2010 Junior Time Trial (Click to see pictures)
FIRST-ROBOtic 2010 Junior Time Trial (Click to see pictures)
Links
Graph 1 - A line graph showing the sensor readings when the emitter is pulsed
Graph 2 - A line graph showing the sensor readings after the ambient light has been removed
Graph 3 - A line graph showing how the speed affected braking
Graph 4 - A line graph comparing whether or not a shield around the sensor would affect the braking
Graph 5 - A line graph combining 3 separate test runs measuring the acceleration over several maze sections
